Jasper's Portfolio
About Me
Hello! I'm a roboticist passionate about solving problems. Sometimes I use robots to solve these problems, and sometimes I am the robot. When I am not thinking about control theory or robot dynamics, then I am either reading or in the kitchen. And sometimes I also do sports.
I enjoy working in a team, brainstorming various solutions, keeping each other on task. I also like playing with expensive robots, so do tell me when there's something I really shouldn't be touching.
Download my CV (updated Feb 2025)My Projects
Master's Thesis: Deployment and Optimization of a Multi-Robot System for Sample Transfer in an Automated Chemistry Laboratory
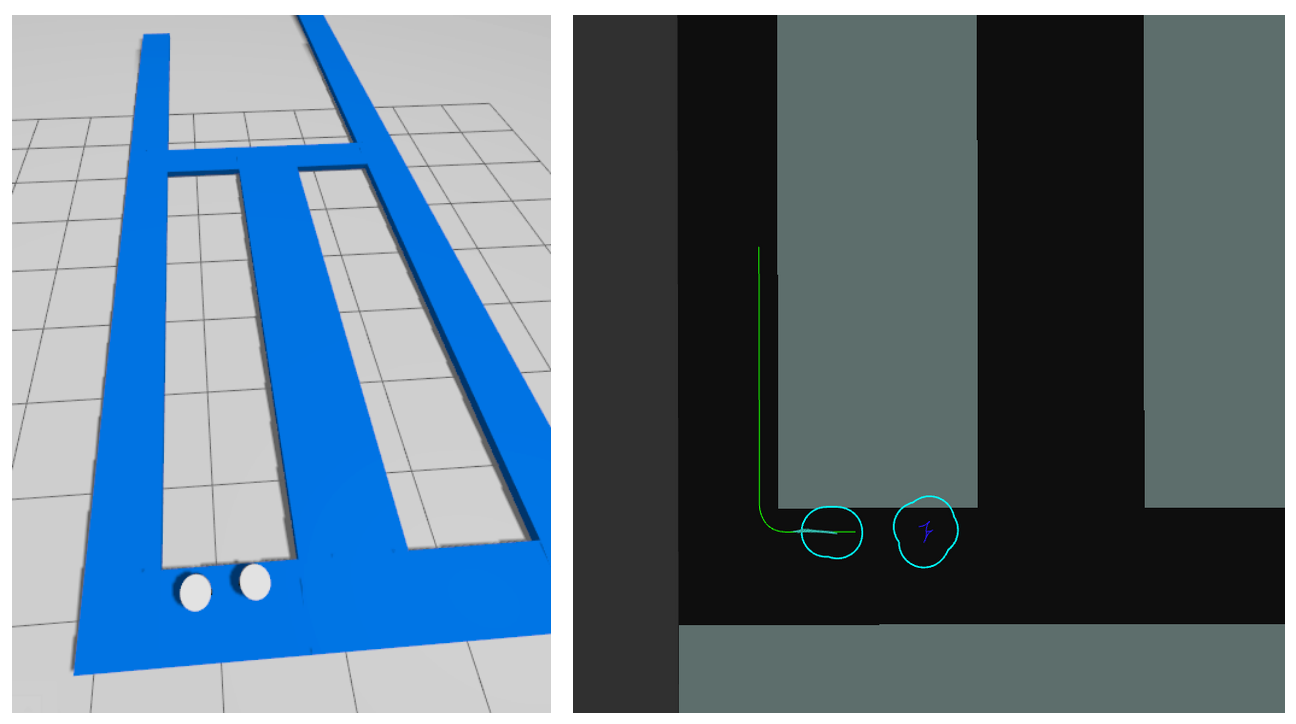
Swiss Cat+ (West hub) is a data-driven automated infrastructure for catalyst discovery and optimization. One of its main goals is the application of robotic platforms to synthesize homogeneous catalysts. In this process, chemicals are transferred from each analysis or synthesis equipment with the aid of robots. Because the synthesis and analysis of these chemicals require the use of several instruments, there must be a method to move the plates from one instruments to another. To do so, the engineers at Swiss Cat+ have decided to use mobile robots that would drive the chemical plates around, and a robot arm would load and unload the plates. The mobile robots drive on a track mounted on the ceiling, above the lab. For this project, I:
- Created a simulated environment to test and visualize control and path planning algorithms.
- Replaced ROS Nav2 with a structured centralized multi-agent controller, using RRT*, A*, and behaviour trees.
- Improved mobile robot design.
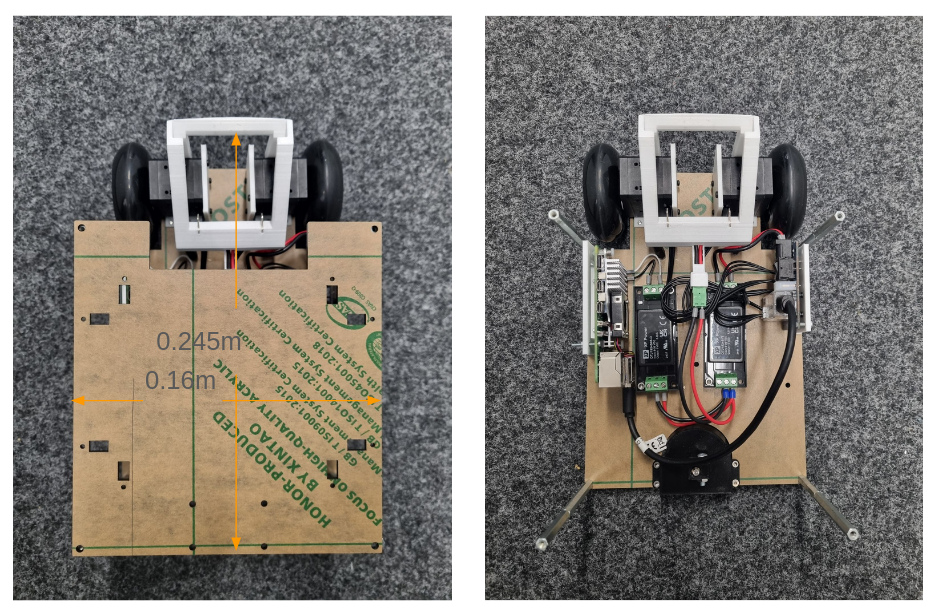
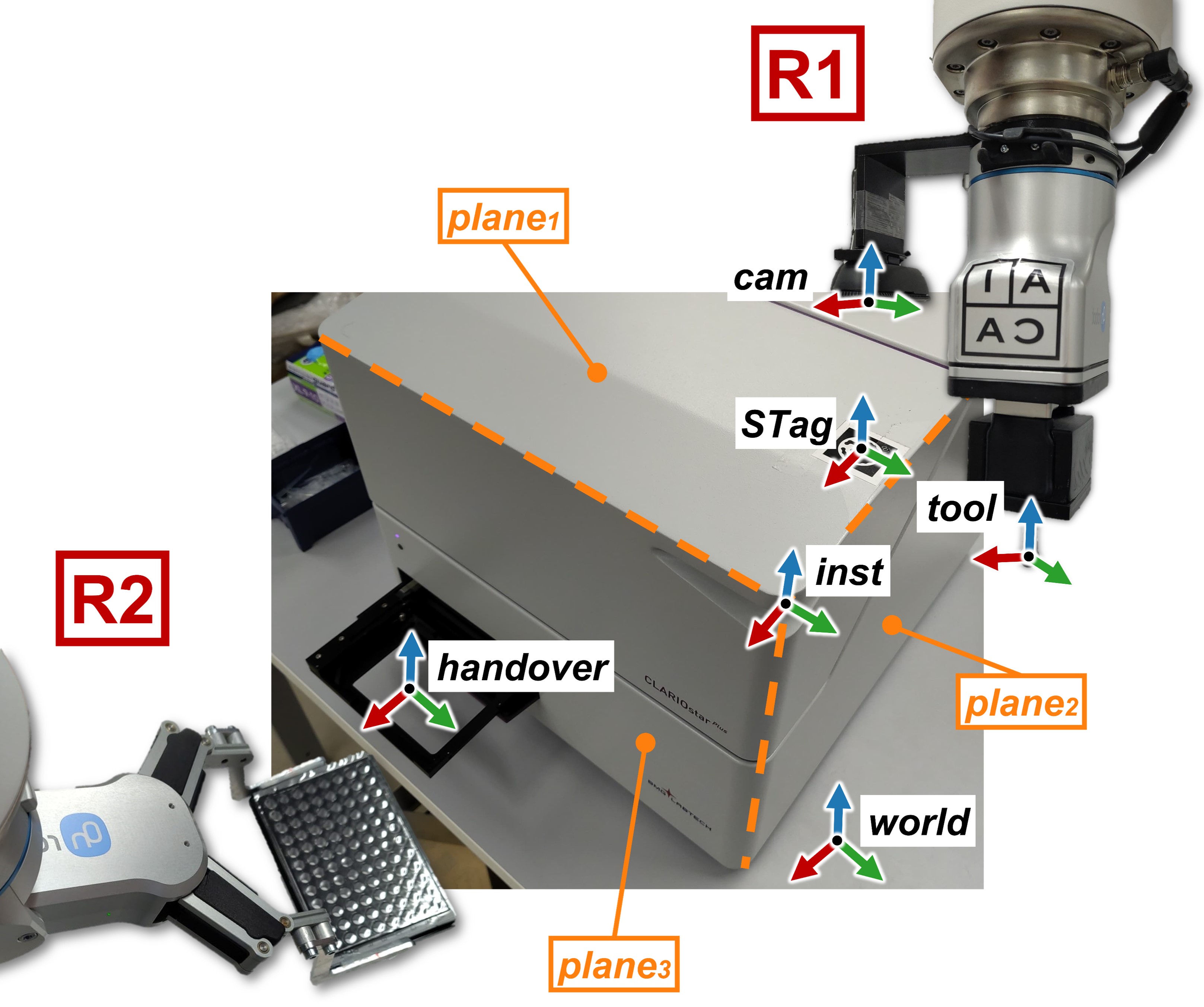
Reliable and Robust Robotic Handling of Microplates via Computer Vision and Touch Feedback
Worked with CREATE lab and AICA to create a localisation method for a mobile robot with dual 6-axis arm setup mounted. This robot is used for lab automation, to transfer lab trays using a mobile robot arm. Thus, localising the robot arm with lab instrumentation is necessary each time after the robot moves, and localisation should be fast and precise.
Here, I created a system that had an accuracy of 1.2mm and 0.4 deg, localised in under a minute. This is done using:
- Fast localisation using STAG visual markers and a webcam attached to the robot arm.
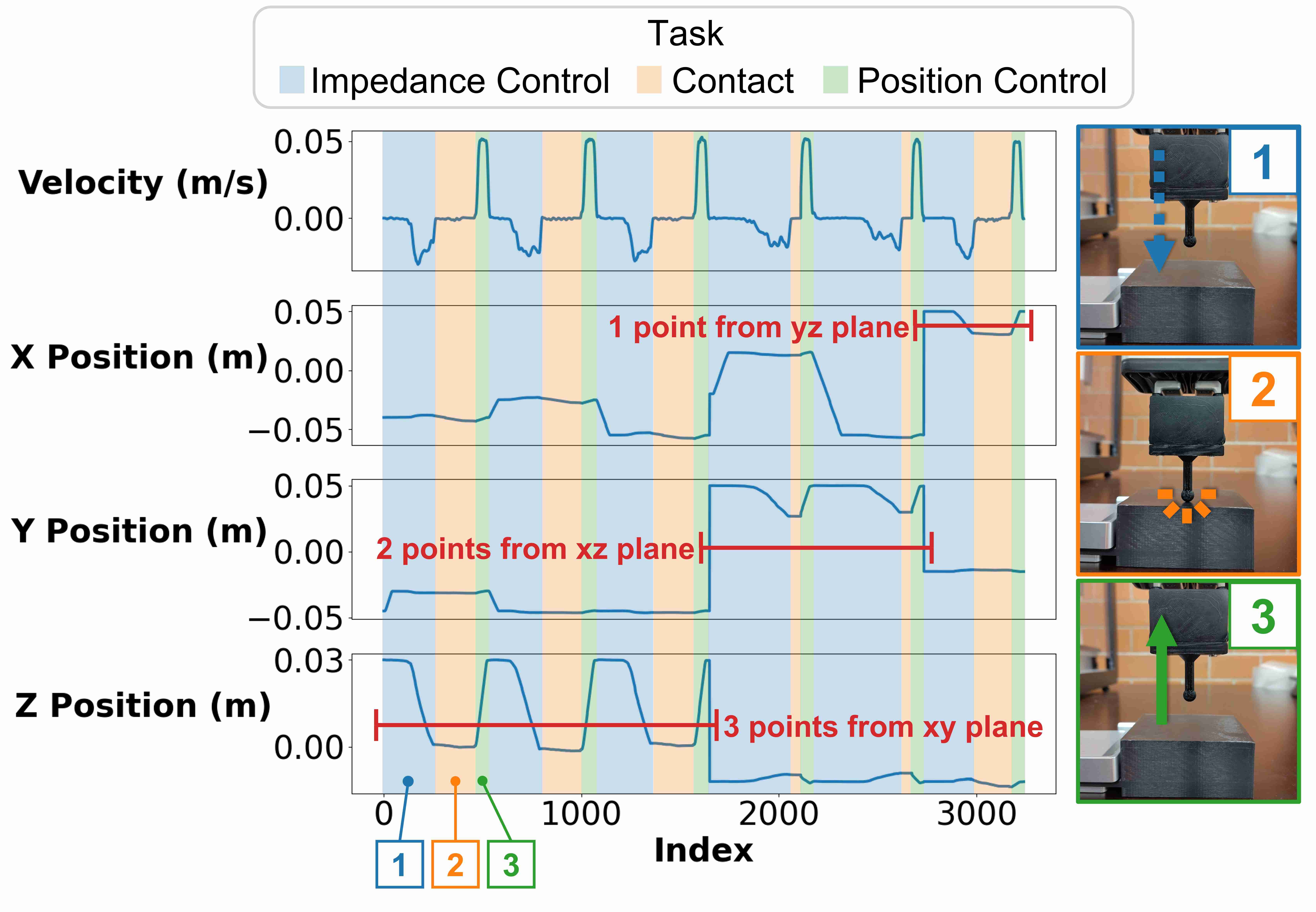
- Precise localisation using force feedback on a body with 3 orthogonal surfaces.
All these ideas and figures are published (credits) in the paper: Reliable and robust robotic handling of microplates via computer vision and touch feedback by Scamarcio, Tan (Me!), Stellaci and Hughes, Front. Robot. AI, 2025
View paper hereSmaller Class Projects
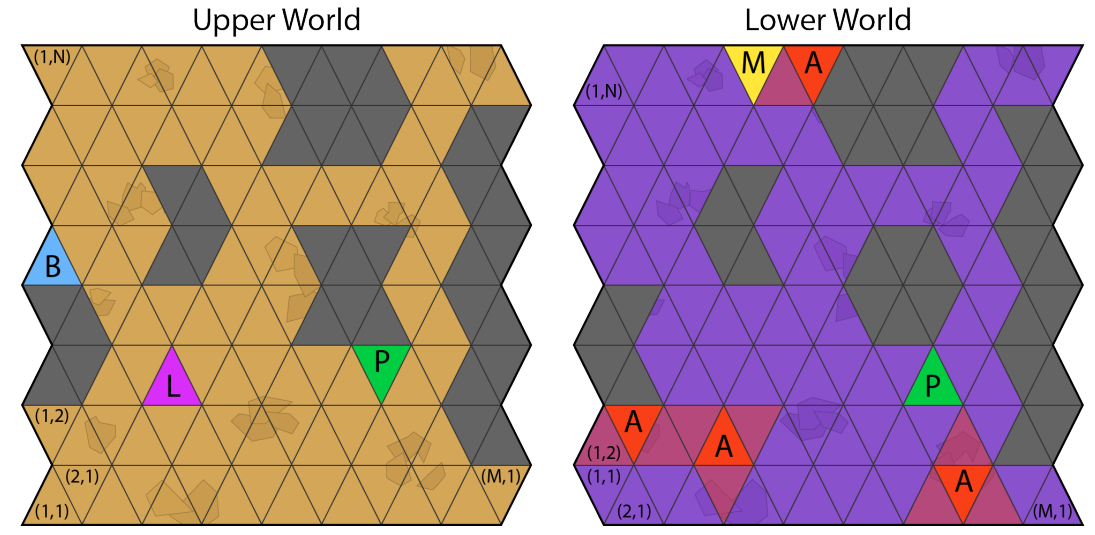
Dynamic Programing Space Adventure (For Prof. D'Andrea's class on Dynamic Programming and Optimal Control)
Solved a dastardly dynamic programming problem about a robot travelling to hell and finding gems while avoiding humans. This was solved using linear programming, after also trying value and policy iteration. We came in 4th overall (the top 3 teams used python while we used matlab, so really we came in first in this programming language).